Les drones : une solution pour demain ?
Modifié le :
Pour le transport des marchandises ou même le transport des personnes, les drones sont-ils une solution d’avenir ? Éléments de réponse dans ce nouvel épisode de notre podcast Détour vers le futur.
Passer par les airs pour se faire livrer une pizza ou une paire de chaussures, prendre un taxi volant pour éviter les encombrements des centres villes, ou même profiter d’un drone assistant pour nous apporter des outils et nous aider à bricoler ou à travailler… Est-ce que tout cela relève de la pure science-fiction, ou bien les drones sont-ils une solution d’avenir crédible ?
« Les drones : une solution pour demain ? » , réponse dans notre podcast avec nos invités :

Catherine Tessier
est directrice de recherche à l’ONERA à Toulouse et référente intégrité scientifique et éthique de la recherche de l’ONERA. Elle enseigne à l’ISAE-SUPAERO. Ses recherches portent sur la modélisation de cadres éthiques et sur les questions éthiques liées à l’« autonomie » des robots. Elle est membre du Comité national pilote d’éthique du numérique et membre du Comité d’éthique de la défense. Elle a fait partie du Groupe d’experts ad hoc de l’UNESCO en vue de l’élaboration de la recommandation relative à l’éthique de l’Intelligence Artificielle.

Daniel Sidobre
Maître de conférences émérite à l’Université Toulouse III – Paul Sabatier depuis 1992.
Il obtient une maîtrise de mécanique de l’Université Pierre et Marie Curie, l’agrégation de génie-mécanique en 1985, puis un DEA en automatique de l’UPS en 1986, un doctorat en robotique de l’UPS en 1990 et une habilitation à diriger les recherches en 2009.
Après un séjour sabbatique d’un an à l’Université Mc Gill de Montréal, Canada, pour travailler sur le frottement de contact, il effectue un séjour de trois mois à l’Università degli Studi di Napoli Federico II, Italie, pour travailler sur la manipulation.
Il a travaillé un an dans l’industrie aéronautique et a enseigné la production mécanique à l’UFR FSI de l’UPS.
Membre du laboratoire LAAS-CNRS, il effectue aussi des recherches dans le domaine de la manipulation robotisée et de l’interaction homme-robot. Il a ainsi participé et pris des responsabilités dans plusieurs projets nationaux et européens parmi lesquels FP7-DEXMART, ANR-ASSIST, ANR-ICARO, ANR-The_Flying_Coworker.
Pour en savoir plus
Une émission présentée par Marina Léonard @NinadesJardins et Laurent Chicoineau @LaurentChic
Réalisation : Arnaud Maisonneuve @arnomaisonneuve.
Prise de son : Laurent Codoul
Une coproduction Quai des Savoirs / CNRS
En partenariat avec l’INA
Ces recherches ont été financées par l’Agence Nationale de la Recherche (ANR). Ce podcast a bénéficié d’un financement dans le cadre de l’appel à projet Sciences Avec et Pour la Société.

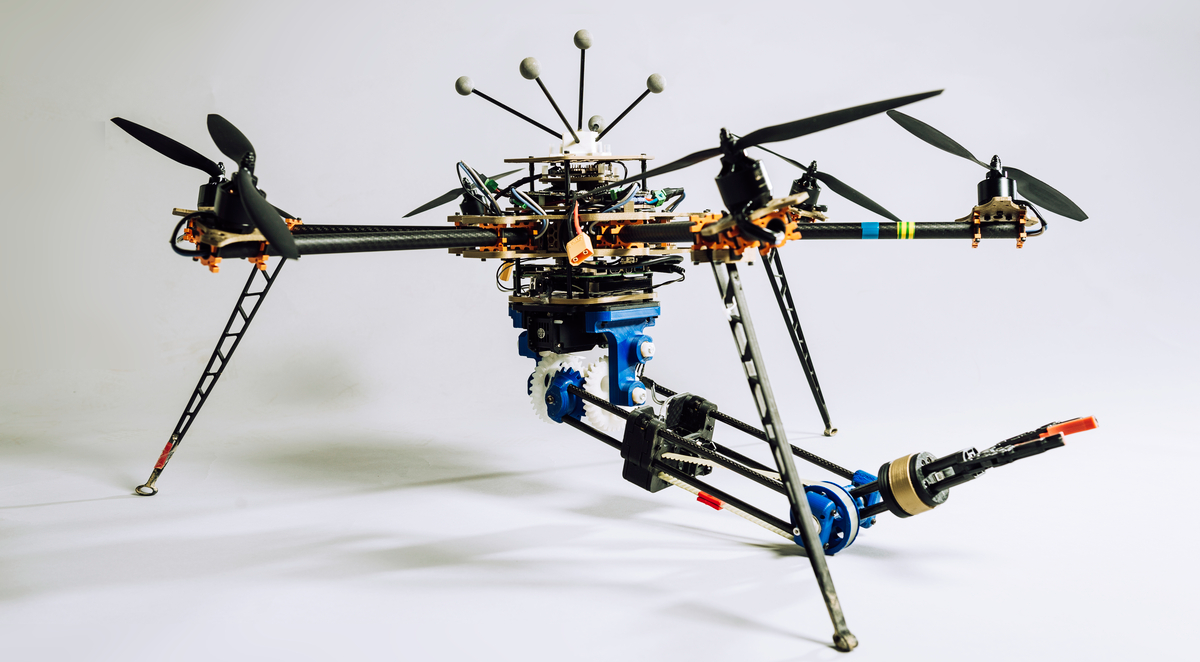
Crédit photo en tête : © Cyril FRESILLON / LAAS / CNRS Images : Drone muni d’un bras lui permettant de saisir des objets. Il peut aussi appliquer un capteur au contact de surfaces de l’environnement, par exemple pour évaluer le vieillissement d’une structure en béton. Ses 6 hélices orientées dans différentes directions lui permettent de se stabiliser en étant légèrement penché, notamment pour que son bras puisse atteindre des éléments situés sur les côtés du robot. Il est développé au LAAS-CNRS dans le cadre de recherches sur les robots aériens. UPR8001 Laboratoire d’analyse et d’architecture des systèmes 20200084_0082.